FMSL系列直驱滤光片轮
高精度、高速度、高集成度
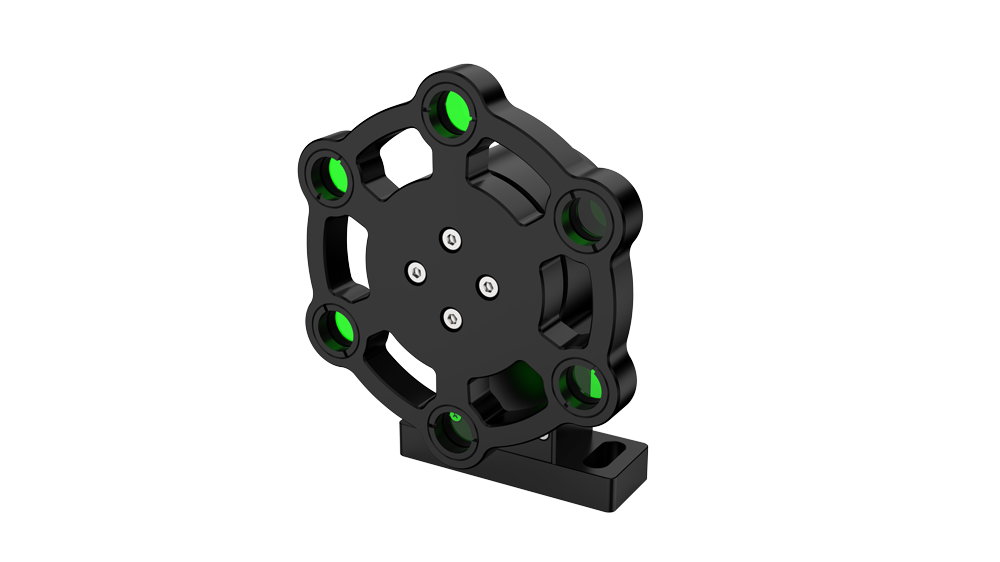
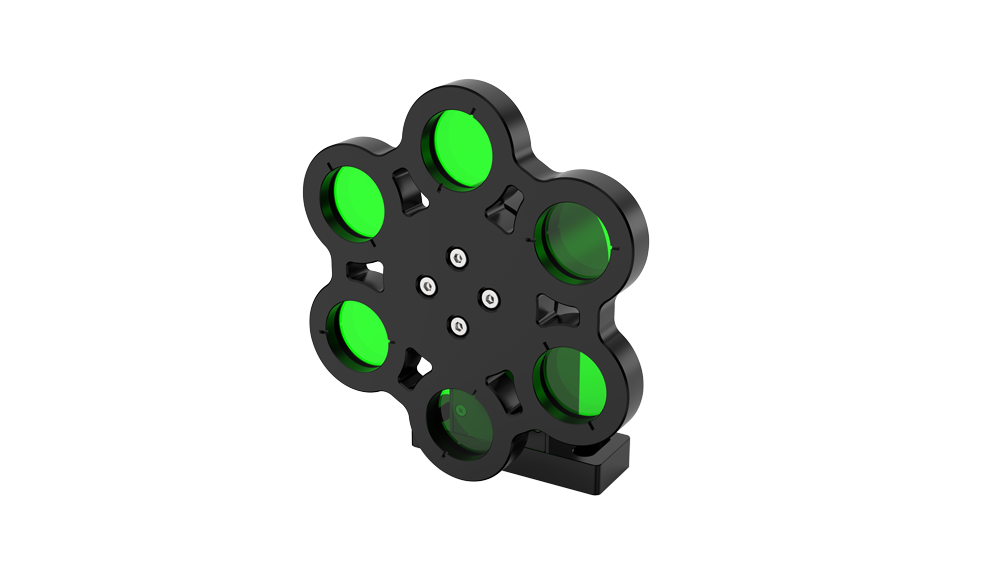
菲克科技 FMSL 系列直驱滤光片轮,专为需要快速、精准切换光谱的科研和工业应用而设计。FMSL 系列滤光片轮采用先进的直驱步进技术,具备高精度、高速度、低噪音等特点,结构紧凑,易于集成,提供多种配置选择,满足多样化的应用需求。滤波轮采用驱控一体电机,只需连接电源和通讯线缆即可通过PC进行控制,无需控制器。可定制遮光版本,价格咨询客服。
主要特点
多规格可选,满足更多应用需求: 提供 4-12 孔位可选的滤光片轮,孔径尺寸0.5、1、1.5、2英寸。并可定制波片镜架和旋转台,结构紧凑,可灵活集成于各种空间受限的应用场景。
直驱步进技术,高速精准: 采用直驱步进电机技术,相比传统蜗轮蜗杆结构,转速更快,精度更高,响应更迅速。
采用驱控一体设计:只需连接电源和通讯线缆即可通过PC进行控制。
高分辨率,精细控制: FMSL 系列滤光片轮拥有极佳的微步能力,可实现快速、精准的定位,满足对高动态性能的追求。
强大软件支持,轻松操控: 免费标准版 SDK,支持 Window、Linux 环境下多种开发语言 (C/C++、C#、Matlab、LabVIEW 等),方便用户进行二次开发和系统集成。
产品应用
偏振光学 Polarized Optics、航空航天 Aerospace、滤波轮 Filter Wheel、遮光器 Shutter、高速旋转台 High-speed Rotary Stage
关联产品
|
Model |
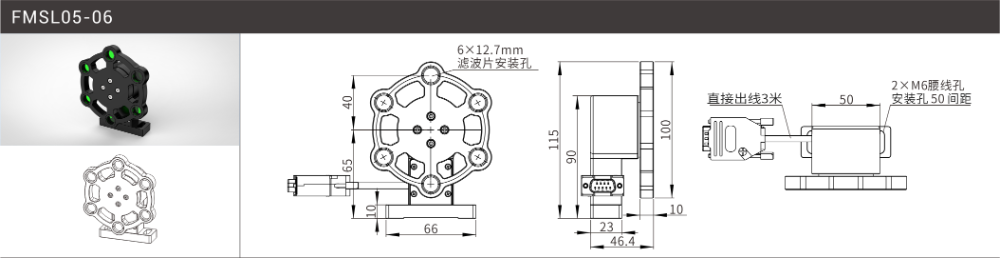
FMSL05-06 |
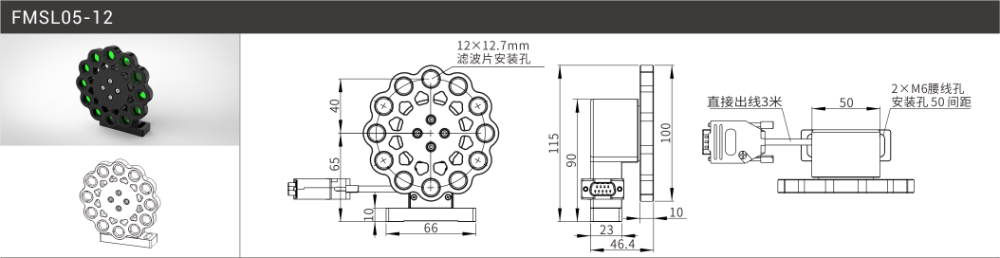
FMSL05-12 |
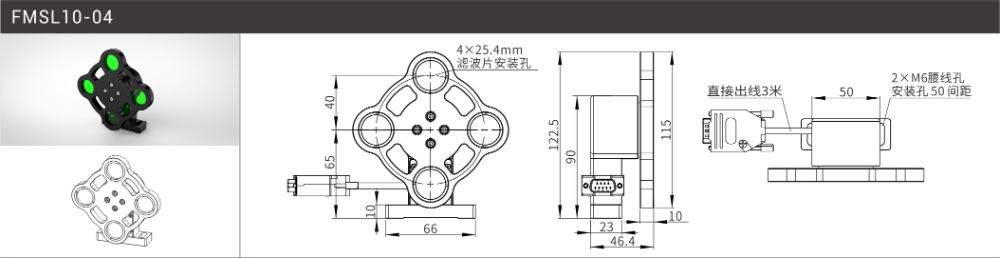
FMSL10-04 |
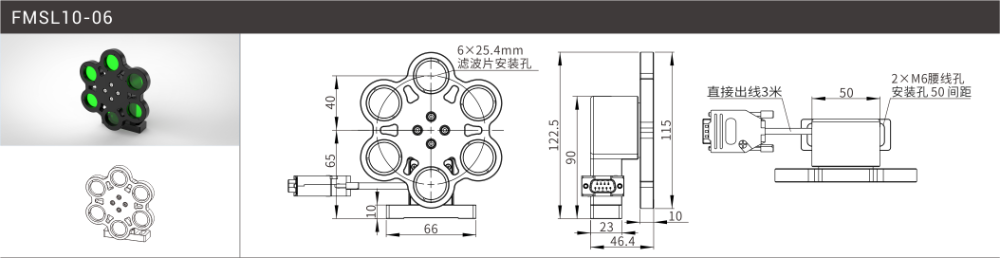
FMSL10-06 |
|
行程 Travel(°) |
360 |
360 |
360 |
360 |
|
负载 Load Capacity(Kg)[1] |
0.2 |
0.2 |
0.2 |
0.2 |
|
分辨率 Resolution(°) |
0.05 |
0.05 |
0.05 |
0.05 |
|
滤波片数量 Wheels |
6 |
12 |
4 |
6 |
|
滤波片尺寸 Filter Size(英寸) |
0.5 |
0.5 |
1.0 |
1.0 |
|
最小步进量 Min.Incremental Motion(°)[2] |
0.05 |
0.05 |
0.05 |
0.05 |
|
单向重复定位精度/保证值 Undirection Repeatability[3]/Guaranteed(°)[4] |
±0.04 or 0.08 |
±0.04 or 0.08 |
±0.04 or 0.08 |
±0.04 or 0.08 |
|
单向重复定位精度/典型值 Undirection Repeatability/Typical(°) |
±0.025 or 0.05 |
±0.025 or 0.05 |
±0.025 or 0.05 |
±0.025 or 0.05 |
|
双向重复定位精度/保证值 Bi-Directional Repeatability/Guaranteed(°) |
±0.08 or 0.16 |
±0.08 or 0.16 |
±0.08 or 0.16 |
±0.08 or 0.16 |
|
双向重复定位精度/典型值 Bi-Directional Repeatability/Typical(°) |
±0.04 or 0.08 |
±0.04 or 0.08 |
±0.04 or 0.08 |
±0.04 or 0.08 |
|
定位精度/保证值 Accuracy[3]/Guaranteed(°) |
±0.1 or 0.2 |
±0.1 or 0.2 |
±0.1 or 0.2 |
±0.1 or 0.2 |
|
定位精度/典型值 Accuracy/Typical(°) |
±0.06 or 0.12 |
±0.06 or 0.12 |
±0.06 or 0.12 |
±0.06 or 0.12 |
|
最大速度 Max.Speed(°/s)[5] |
3600 |
3600 |
3600 |
3600 |
|
Model |
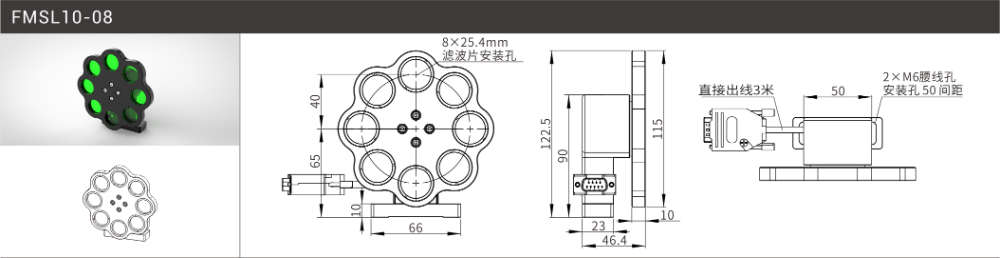
FMSL10-08 |
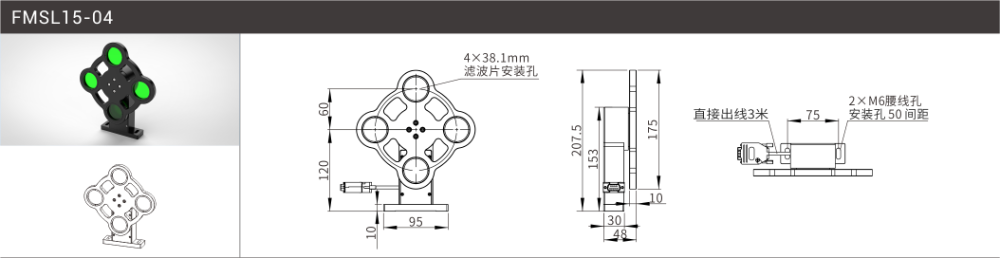
FMSL15-04 |
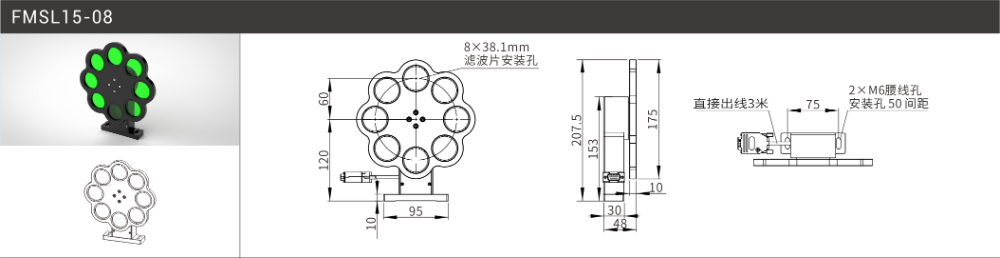
FMSL15-08 |
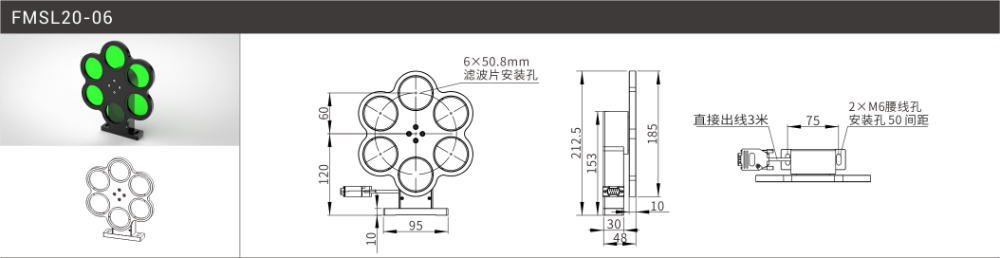
FMSL20-06 |
|
行程 Travel(°) |
360 |
360 |
360 |
360 |
|
负载 Load Capacity(Kg)[1] |
0.2 |
0.2 |
0.2 |
0.2 |
|
分辨率 Resolution(°) |
0.05 |
0.05 |
0.05 |
0.05 |
|
滤波片数量 Wheels |
8 |
4 |
8 |
6 |
|
滤波片尺寸 Filter Size(英寸) |
1.0 |
1.5 |
1.5 |
2.0 |
|
最小步进量 Min.Incremental Motion(°)[2] |
0.05 |
0.05 |
0.05 |
0.05 |
|
单向重复定位精度/保证值 Undirection Repeatability[3]/Guaranteed(°)[4] |
±0.04 or 0.08 |
±0.04 or 0.08 |
±0.04 or 0.08 |
±0.04 or 0.08 |
|
单向重复定位精度/典型值 Undirection Repeatability/Typical(°) |
±0.025 or 0.05 |
±0.025 or 0.05 |
±0.025 or 0.05 |
±0.025 or 0.05 |
|
双向重复定位精度/保证值 Bi-Directional Repeatability/Guaranteed(°) |
±0.08 or 0.16 |
±0.08 or 0.16 |
±0.08 or 0.16 |
±0.08 or 0.16 |
|
双向重复定位精度/典型值 Bi-Directional Repeatability/Typical(°) |
±0.04 or 0.08 |
±0.04 or 0.08 |
±0.04 or 0.08 |
±0.04 or 0.08 |
|
定位精度/保证值 Accuracy[3]/Guaranteed(°) |
±0.1 or 0.2 |
±0.1 or 0.2 |
±0.1 or 0.2 |
±0.1 or 0.2 |
|
定位精度/典型值 Accuracy/Typical(°) |
±0.06 or 0.12 |
±0.06 or 0.12 |
±0.06 or 0.12 |
±0.06 or 0.12 |
|
最大速度 Max.Speed(°/s)[5] |
720 |
720 |
720 |
720 |
※ 备注
[1]:水平放置下的中心垂直负载。
[2]:最小运动增量不等同于分辨率,最小运动增量是指运动系统在连续、稳定情况下能够移动的最小量。一般来说,系统分辨率远小于最小运动增量。考虑传动结构和编码器对系统误差的影响,直线电机位移台与步进电机位移台相比,其最小运动增量更加接近于分辨率。
[3]:精度测量数据是平台在水平放置的情况下使用激光干涉仪测量的数据,测量标准参照GB/T17421-2000。
[4]:典型值和保证值的区别见技术指南。
[5]:最大速度为典型值,根据负载和控制器的不同会有区别。


 FMSL系列电动滤波轮
FMSL系列电动滤波轮
立即下载
菲克科技产品目录
立即下载
FMSL-D系列电动滤波轮
立即下载
FMSL系列电动滤波轮
立即下载
FMSL-D系列电动滤波轮
立即下载
 FMSL05-06直驱滤光片轮产品图纸
FMSL05-06直驱滤光片轮产品图纸
立即下载
FMSL05-06直驱滤光片轮尺寸图纸
立即下载
FMSL05-12直驱滤光片轮产品图纸
立即下载
FMSL05-12直驱滤光片轮尺寸图纸
立即下载
FMSL05D-06直驱滤光片轮产品图纸
立即下载
FMSL05D-06直驱滤光片轮尺寸图纸
立即下载
FMSL05D-12直驱滤光片轮产品图纸
立即下载
FMSL05D-12直驱滤光片轮尺寸图纸
立即下载
FMSL10-04直驱滤光片轮产品图纸
立即下载
FMSL10-04直驱滤光片轮尺寸图纸
立即下载
FMSL10-06直驱滤光片轮产品图纸
立即下载
FMSL10-06直驱滤光片轮尺寸图纸
立即下载
FMSL10-08直驱滤光片轮产品图纸
立即下载
FMSL10-08直驱滤光片轮尺寸图纸
立即下载
FMSL10D-04直驱滤光片轮产品图纸
立即下载
FMSL10D-04直驱滤光片轮尺寸图纸
立即下载
FMSL10D-06直驱滤光片轮产品图纸
立即下载
FMSL10D-06直驱滤光片轮尺寸图纸
立即下载
FMSL10D-08直驱滤光片轮产品图纸
立即下载
FMSL10D-08直驱滤光片轮尺寸图纸
立即下载
FMSL15-04直驱滤光片轮产品图纸
立即下载
FMSL15-04直驱滤光片轮尺寸图纸
立即下载
FMSL15-08直驱滤光片轮产品图纸
立即下载
FMSL15-08直驱滤光片轮尺寸图纸
立即下载
FMSL15D-04直驱滤光片轮产品图纸
立即下载
FMSL15D-04直驱滤光片轮尺寸图纸
立即下载
FMSL15D-08直驱滤光片轮产品图纸
立即下载
FMSL15D-08直驱滤光片轮尺寸图纸
立即下载
FMSL20-06直驱滤光片轮产品图纸
立即下载
FMSL20-06直驱滤光片轮尺寸图纸
立即下载
FMSL20D-06直驱滤光片轮产品图纸
立即下载
FMSL20D-06直驱滤光片轮尺寸图纸
立即下载